NVIDIA Physical AI技術革新:自動運転とロボット開発を加速する新スキル群#
読了時間:約5分 | 対象:AI/ロボット技術に関心のある方
AI技術の発展により、物理世界で動作するAIシステムの開発が急速に進んでいます。しかし、従来の開発プロセスでは複数のツールを組み合わせる複雑な作業が必要でした。この課題を解決するため、NVIDIAは革新的なアプローチを発表しました。
この記事で解決できる疑問
- 物理AI開発の現在の課題とは?
- NVIDIAの新技術がもたらす変化は?
- 具体的にどんな分野で活用できるのか?
【3分で理解】重要ポイント早見表#
| 項目 | 内容 |
|---|---|
| 発表イベント | CVPR(コンピュータビジョン分野の主要学会) |
| 核心技術 | NVIDIA Cosmos 3(物理AI向けオープンモデル) |
| 対象分野 | 自動運転、ロボット、視覚AIシステム |
| 主な特徴 | 統合ワークフロー、エンドツーエンド開発支援 |
| 解決する課題 | 分散ツールの統合、開発速度の向上 |
基本解説:Physical AIとは?従来の課題#
**Physical AI(物理AI)**とは、現実世界で物理的に動作するAIシステムを指します。自動運転車、産業用ロボット、視覚検査システムなどが代表例です。
開発における根本的な課題#
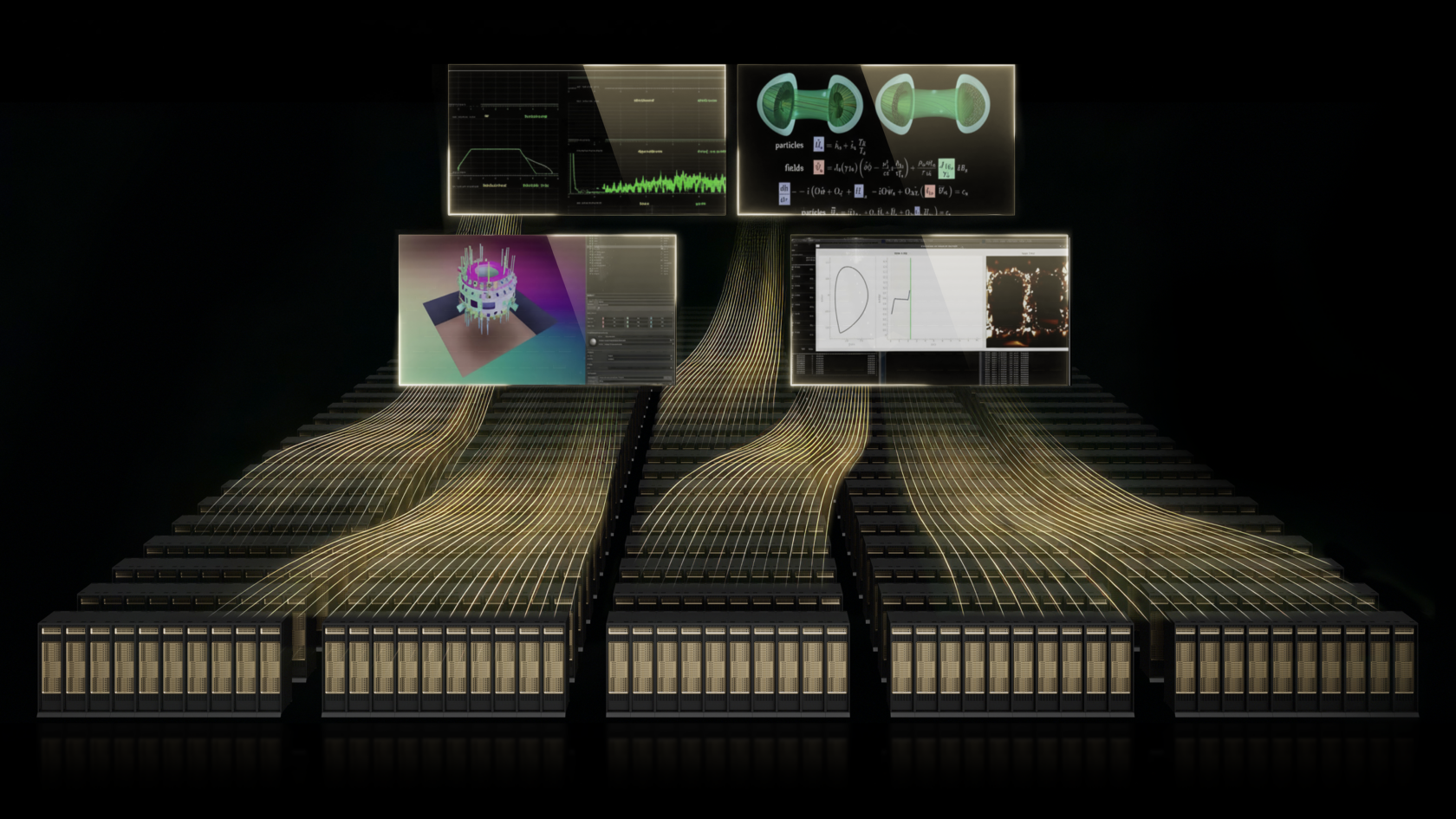
NVIDIAによると、物理AI研究の核心的な課題は単に強力なモデルを開発することではないとされています。真の課題は以下の要素を含む完全なワークフロー構築にあります:
- 現実世界シーンの再構築
- エッジケースシナリオの生成
- ポリシーの訓練
- 行動の評価
- 高速な反復実験
従来、これらのステップは個別のツールに分散しており、研究者がそれらを組み合わせる作業が実験ペースを大幅に遅らせていました。
詳細分析:NVIDIA Cosmos 3と統合スキル群#
Cosmos 3:世界初のフル統合モデル#
NVIDIAはNVIDIA Cosmos 3を物理AI向けのオープン・フロンティアモデルとして発表しました。この技術は以下の特徴を持ちます:
- 世界初のフルオムニモデル:視覚推論、世界生成、行動生成を統合
- 物理AI向け公開リーダーボードで主導的地位
- 世界基盤モデルとして物理AI開発の中核機能を提供
統合ワークフローの実現#
NVIDIA physical AIスキルは、Cosmos 3、NVIDIAライブラリ、シミュレーションフレームワークと連携し、モデル機能から拡張可能なエンドツーエンドワークフローへの移行を従来以上に高速化します。
業界への影響:3つの重点分野での革新#
1. 自動運転車研究の加速#
「ロングテール」問題の解決#
自動運転研究者が直面する**「ロングテール」問題**とは:
- 稀な交通状況
- 特殊な道路形状
- 照明条件の変化
- エッジケース行動
これらは繰り返し収集が困難ながら、訓練と検証に重要な要素です。
革新的な技術ソリューション#
Neural Reconstructionスキル
- フリートデータから編集可能な3D シーンを生成
- シミュレーションと合成データ生成をサポート
- NVIDIA Omniverse NuRec、InstantNuRec等の技術で高速化
高度なシミュレーション環境
- NVIDIA AlpaGym:オープンソース強化学習フレームワーク
- NVIDIA OmniDreams:フォトリアリスティックレンダリング搭載
- NVIDIA Alpamayo 2 Super:320億パラメータのVLAモデル
2. 視覚AIシステムの実用化推進#
データ不足という壁#
視覚AI研究では、視覚条件、オブジェクト状態、時間的イベントの変化を研究するための制御された例の不足がボトルネックとなっています。
NVIDIA Metropolisスキルの活用#
新しいNVIDIA Metropolisスキルにより、研究者は以下が可能になります:
- 合成視覚シナリオの生成(異常検知を含む)
- データ拡張
- 疑似ラベリングのサポート
具体的な機能例:
- Defect Image Generationスキル:異なる表面での様々な欠陥例を生成
- Video Augmentationスキル:大量動画データからの洞察抽出
- VSS Blueprint:動画検索・要約の自動化
3. ロボット学習のスケール化#
反復学習の効率化#
ロボットへのスキル習得(ナビゲーション、操作等)は反復プロセスが核心です。研究者のボトルネックは以下でした:
- 制御された環境の構築
- 十分なポリシーロールアウト
- タスク・設定・形態間での行動変化の理解
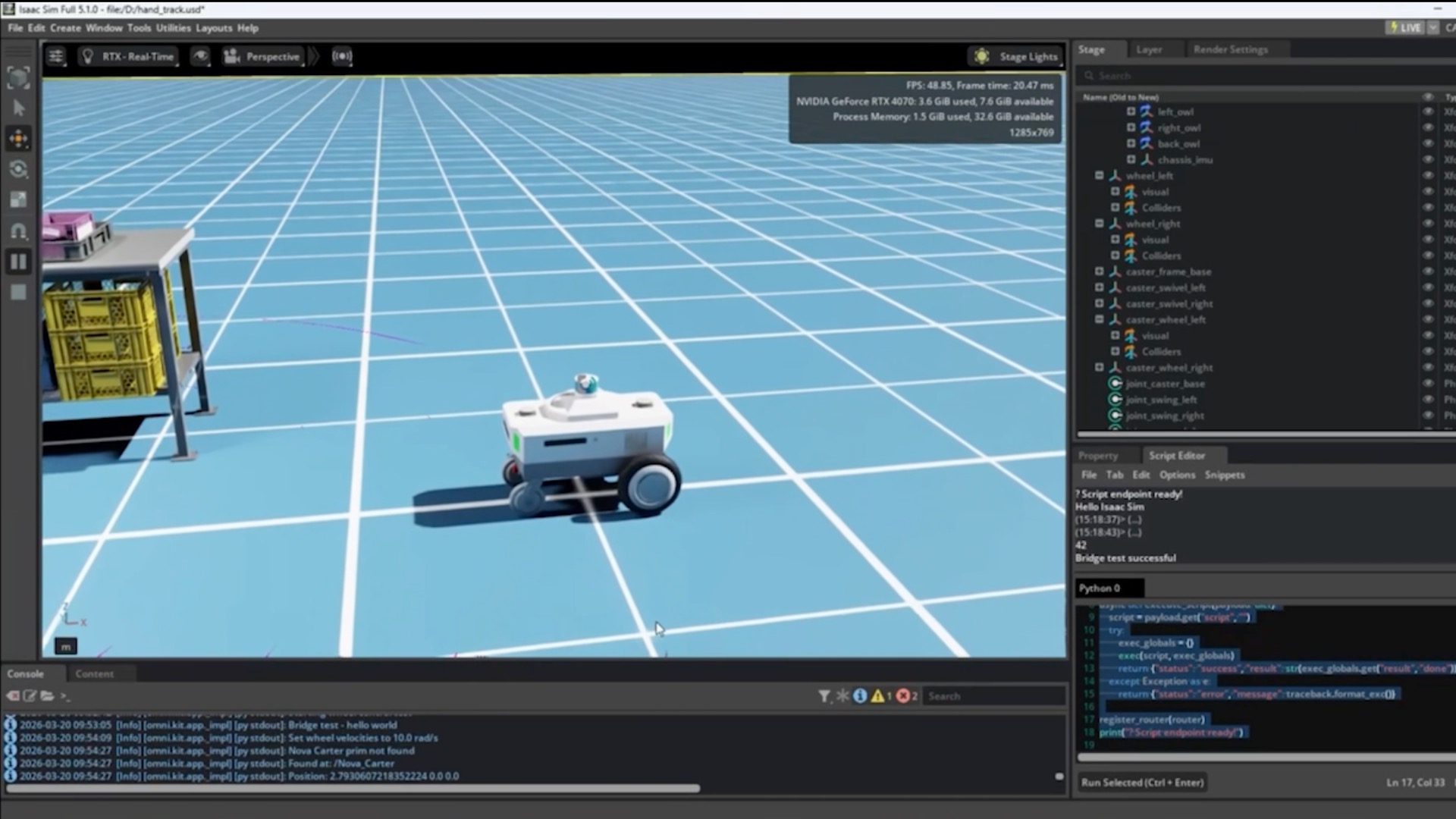
統合ロボティクススキル#
NVIDIA roboticsスキルにより、以下の自動化が実現:
- シーン準備
- シミュレーション実行
- ロボット学習
技術基盤:
- NVIDIA Omniverse libraries
- Isaac Sim
- Isaac Lab frameworks
特殊化されたスキル:
- Isaac mobilityスキル:ナビゲーションワークフロー
- Cosmos-H-Surgical-Simulator:手術ロボティクスデータ生成
実用的な活用方法と導入のポイント#
研究開発での活用#
ワークフロー統合
- 従来分散していたツールの統合管理
- 実験サイクルの高速化
合成データ生成
- 希少なシナリオの人工的作成
- 大規模データセットの効率的構築
シミュレーション環境
- 安全な検証環境での反復実験
- 現実世界展開前のリスク軽減
産業応用の可能性#
ソース記事では、以下の分野での応用可能性が示されています:
- 自動車産業:レベル4自動運転開発
- 製造業:視覚検査システム
- 医療分野:手術支援ロボット
- 物流・サービス:自律移動ロボット
競合他社・類似技術との比較#
NVIDIAの優位性#
学術界での採用状況
ソース記事によると、CVPR 2026受諾論文の過半数でNVIDIA技術(GPU、オープンモデル、シミュレーションフレームワーク、CUDA対応ライブラリ)が参照されています。
採用機関例:
- Carnegie Mellon University
- Stanford University
- UC Berkeley
- Tsinghua University
- Peking University
統合アプローチの価値#
従来の個別ツール組み合わせと比較して、NVIDIAの統合スキル群は以下のメリットを提供します:
- 開発時間の大幅短縮
- ツール間連携の自動化
- エンドツーエンド最適化
【FAQ】よくある質問と回答#
Q1: Cosmos 3は商用利用可能ですか? A1: ソース記事では「オープン・フロンティアモデル」と記載されていますが、具体的なライセンス条項については詳細は元記事を参照してください。
Q2: 既存の開発環境との互換性は? A2: NVIDIAライブラリやCUDA対応ツールとの統合が言及されていますが、具体的な互換性情報は元記事を参照してください。
Q3: 導入に必要なハードウェア要件は? A3: 数千GPU規模でのスケーリングが可能と記載されていますが、最小要件については詳細は元記事を参照してください。
Q4: どの分野から導入を始めるべき? A4: ソース記事では自動運転、ロボット、視覚AIの3分野が重点領域として挙げられています。
まとめ:押さえておくべき5つのポイント#
統合ワークフロー:従来分散していたツールを統合し、開発効率を劇的向上
3つの重点分野:自動運転、ロボット、視覚AIでの具体的ソリューション提供
Cosmos 3の革新性:世界初のフル統合物理AIモデルとしての地位確立
学術界での実績:主要研究機関での幅広い採用と信頼性の証明
実用化への道筋:研究段階から実装まで一貫したサポート体制の構築
NVIDIAの新しい物理AIスキル群は、AIと現実世界の境界を埋める重要な技術革新といえます。特に開発効率の向上と統合ワークフローの実現により、物理AI分野の研究開発が大きく加速することが期待されます。